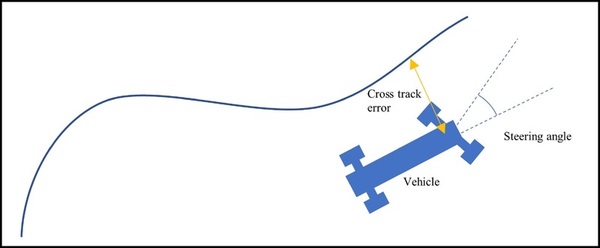
Here, seeking to better understand the control algorithms used in autonomous vehicles, the authors compared the Stanley and pure pursuit control algorithms along with a new version of each. Unexpectedly, they found that no control algorithm offered optimal performance, but rather resulted in tradeoffs between the various ideal results.
Read More...