Comparing the performance of lateral control algorithms on long rigid vehicles in urban environments
(1) Whitgift School, Croydon, United Kingdom
https://doi.org/10.59720/22-104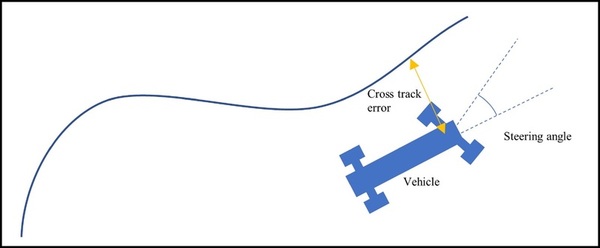
Existing research on autonomous vehicle control is largely focused on how control algorithms perform on cars; long vehicles or buses have not been significantly investigated. Existing studies indicate that people display positive attitudes to using autonomous buses, indicating the value of researching control algorithms for autonomous buses. To provide insight on the performance of control algorithms on autonomous buses, we compared multiple lateral control algorithms on how well they maneuver a long vehicle around three courses resembling urban environments. We compared the Stanley and pure pursuit control algorithms and two new control algorithms which were improved versions of the Stanley and pure pursuit controllers. We compared the control algorithms in a kinematic simulation which recorded the steering angle and cross track error from the front axle for each controller driving the vehicle at 50 km/h around the course. We hypothesized that the Stanley control algorithm would perform the best due to its success in navigating existing vehicles. The Stanley control algorithm had a low cross track error, but it had a large steering angle and large changes in steering angle. The pure pursuit controller had smoother changes in steering angle, but the cross track error was larger than the Stanley controller. Our results suggest that none of the algorithms we tested were optimal, and that an algorithm which can utilize the ability of the Stanley controller to maintain a low cross track error while also keeping a low steering angle change will perform the best for long vehicles.
This article has been tagged with: