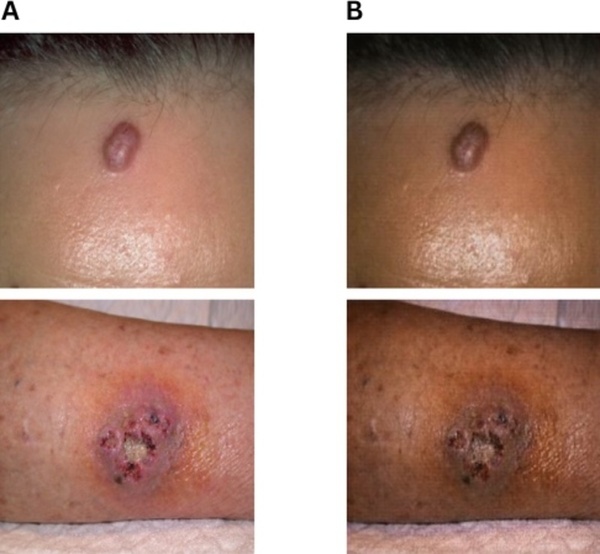
This study investigates skin tone bias in artificial intelligence models used for dermatological disease classification and evaluates a CycleGAN-based data augmentation approach to improve diagnostic performance on darker skin types. We generated synthetic dark-skinned images to enhance dataset diversity and compared model performance before and after augmentation. The results demonstrate that augmentation with synthetic dermatological images can help reduce disparities in diagnostic performance across skin tones, highlighting a practical strategy for improving fairness in dermatology AI systems.
Read More...